The Option Critic Architecture
The Options framework provides theoretical grounds for temporal abstraction in Reinforcement Learning. Each Option can be considered as a macro-action with its policy and termination condition, leading to two levels of policies: one policy over options and several intra-option policies. This paper presents the Option-Critic Architecture, capable of learning both intra-option policies and termination conditions while executing the policy over options, without the need of subgoals or additional rewards.
Idea
The Option Framework
In the Options framework, an option $w \in \Omega$ is a macro-action that, once selected, performs actions according to its internal policy. It is composed by:
- A policy $\pi_w(s, a)$ that represents the probability of taking action $a$ in state $s$ while executing option $w$.
- An initiation set $\mathcal{I}_w \in S$ that defines the states in which an option can be initiated.
- A termination function $\beta_w(s)$ that represents the probability of option $w$ terminating in state $s$.
It is, therefore, possible to define, similarly to the standard Reinforcement Learning framework, an option-value function $Q_{\Omega}(s, w)$, representing the value of being in state $s$ performing option $w$.
For primitive actions, it is defined $Q_U(s, w, a)$, that represents the value of performing action $a$ in the state-option pair $s, w$.
Optimizing $\pi_w$ and $\beta_w$
By employing differentiable intra-option policies $\pi_{w, \theta}(s, a)$ and termination functions $\beta_{w, \vartheta}(s)$, parametrized respectively by $\theta$ and $\vartheta$, the authors derive the gradient of $Q_{\Omega}(s, w)$ with respect to $\theta$ and $\vartheta$. Having the gradients allows performing gradient updates on both the intra-option policy parameters $\theta$ and the termination parameters $\vartheta$.
The Option-Critic Architecture approximates the value of $Q_U$ and updates the intra-option policies and termination functions with the gradient step on $\theta$ and $\vartheta$. Algorithm 1 shows an example of this architecture. Note that values should be updated at a higher rate, while policies and termination functions should be updated less frequently. In this example, the $Q_U$ function is updated in a tabular way with Q-Learning.
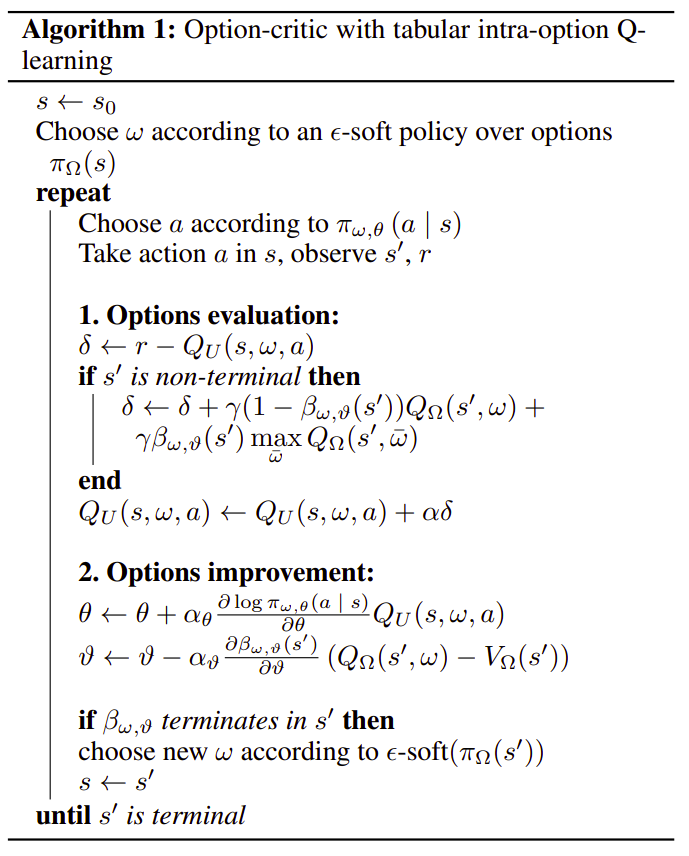
Learning intra-option policies and termination functions with the Option Critic Architecture
It is important to note that Algorithm 1 provides only an example implementation of the Option-Critic Architecture, but many techniques can be employed to estimate $Q_U$ and $Q_{\Omega}$.
Contribution
- Learn without additional help: The Option-Critic architecture allows us to learn a policy over options, the intra-option policies, and the termination functions without specifying option sub-goals or sub-rewards. It is only necessary to determine the number of options.
- Learn termination with Advantage Function: An interesting result of the paper is that the Advantage Function, used in many Actor-Critic RL algorithms, appears naturally in the derivation of the termination function gradient. This makes the gradient update go for an early termination when the advantage is negative, and a continuation of the option while the advantage is high.
- Flexible architecture: The Option-Critic Architecture is flexible and many learning techniques can be employed. The experiments in the paper show how to deal with tabular learning as well as neural network function approximations.
- Improved learning in similar tasks: This paper shows that, compared to “flat” RL algorithms such as SARSA(0) and flat Actor-Critic, Option-Critic-based algorithms learn faster new tasks similar to those they were trained with.
Weaknesses
- Non modularity: It is often difficult, if not impossible, to understand what these options do. By not employing sub-goals or pseudo-rewards, the learned options are not restricted to learn and well-defined behavior. This makes impossible or tied to very specific situations reusing single options into similar tasks. Therefore, we cannot “take” an option and plug it into another agent. We cannot create a more complex task from options learned in smaller tasks. If we trained a robot to go around a warehouse, we have no guarantee that one of the options learned will be related, for example, to the task of opening a door. This will make it impossible to just pick that option and plug it into a similar robot that does a more complex task. We can generally say that, although the learned options show generalization capabilities, they are still tied to their particular configuration.